8.11 Hamlib -- rigctld - table meterhl
piWebCAT has an S meter on receive and five button-selected meter options on transmit.
The five Tx buttons are set up in the buttonshl table.
The meterhl table controls the subsequent repetitive meter reading.
The timing table sets the meter repetition interval
The link between the buttonshl table and the meterhl table is the btnno field values, 61 to 65.
The meterhl table is shown below for my FTdx101D
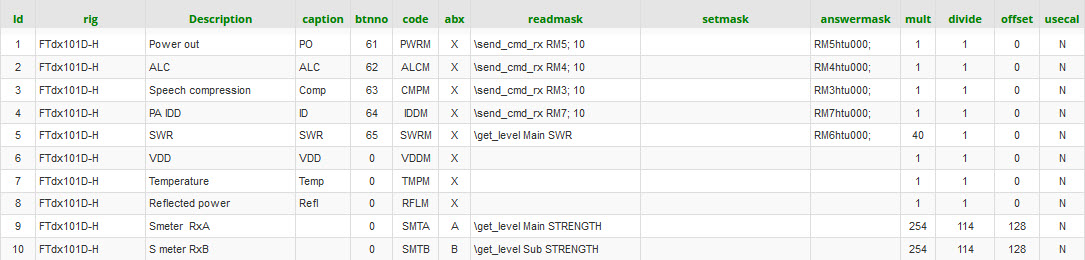
The are two S meter records (RxA and RXb) and eight Tx meter records (reflected power not available on FTdx101D)
The S meter code values SMTA and SMTB are fixed in code and so must be entered as these
so that the server will recognise them.
The Tx meter code fields are copied to the client at startup and so you can use any code of your choice.
Five of the Tx meters have been assigned to the available five option buttons as shown below
![]()
In the meterhl table, these are the items with a non-zero btnno field (ie: 61 to 65 )
Meter table field list:
- rig The current radio - drop down selector (from radios table)
- description Descriptive text- no function
- caption The caption to the left of the slider. Note that this only applies to the central
column of sliders with no adjacent on/off button with identifying caption. - btnno The sliders's unique, fixed, numeric identifier as discussed earlier.
- code Specified once here. Used in message from client and recognised in server.
- abx If A or B, Client sends Vfo A or B to server. abx allows server to read appropriate meter.
For Tx meters abx = X (not VFO-specific) - readmask The character string used to read from the rig via rigctld.
- setmask The character string used to write to the rig via rigctld.
Contains # which is substituted on button action by the data from buttonshl. - answermask This is used for commands not supported by rigctld where we use \send_cmd_rx.
It is the character pattern of the answer and has the same format as in the ASCII system.
See Command masks
We use \send_cmd_rx here because not all the metering levels are supported by rigctld. - mult Multiplier (default = 1)
- divide Divisor (default = 1) Meter CAT value is scaled by (CAT * mult) / divide
before being optionally modified by the metercal table data. - usecal Y or N. If Y, then the CAT value is processed by the calibration table.
( 20 point calibration for each meter with linear interpolation between points)
Four of the records in the illustrated table use \send_cmd_rx.
These are explained in the next section : Unsupported commands