8.14 Hamlib -- rigctld - Unsupported commands - \send_cmd_rx
Many radios have hundreds of less commonly used commands and configuration setting that are
not supported by rigctl / rigcltd.
To deal with these, Hamlib provides the command: \send_cmd_rx to which we append CAT control
sequences from the specific radio's CAT manual.
At the time of writing this, I have only used \send_cmd_rx as follows:
- Fully implemented with an ASCII text based rig, the FTdx101D.
- Use for data write with a CIV command (Simplex duplex switching)
The rigctld documentation shows that binary data is supported using format \0xAA\0xBB.. etc
However, piWebCAT would need special provision to and interpret data received back from an Icom CI-V rig.
ie: bespoke processing code which I have not written.
I illustrate in following sections the use of \send_cmd_rx with FTdx101D features that rigctl does not support:
These are: roofing filter switching and contour and APF switching and control
In: rigctl: supported rig controls I described how to determine the list of supported commands for a radio.
The results for the FTdx101D are repeated below:
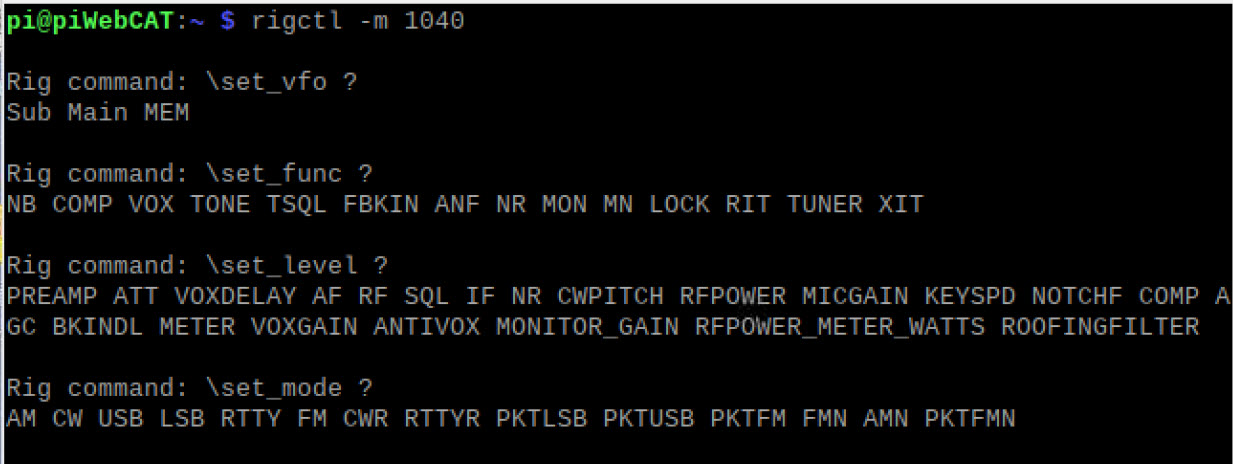
Examination of the func and level lists reveal no codes for contour and APF (Audio Peak Filter) control.
The FTdx101D has a CO.... command which supports on/off and frequency control for both contour and APF.
We can use rigctld \send_cmd_rx to send such actual rig commands when they are not supported by Hamlib.
This includes the extensive range of menu settings in modern transceivers.
For example: The FTdx101D has an EX.... command which supports over 230 menu settings.
piWebCAT's high degree of user configurability allows it to access these settings both in direct ASCII mode
and also through Hamlib using \send_cmd_rx.
An example that I use is the menu option to switch SSB modulation audio source between front panel microphone
socket and rear DATA connector. I need to switch to rear DATA connector source if I am remotely operating via
the Mumble VOIP (Voice Over IP) system. The Yaesu command is: EX010111#; where # = 0 or 1.
Using Hamlib to read this switch, I send:
\send_cmd_rx EX010111; 10 (The 10 informs piWebCAT how many returned characters to expect)
The button is labelled ssbin :