2.18 Learning guide - finding Hamlib data values
This section describe how to find Hamlib control value using rigctl at the command line.
I use the example of the three ACG buttons which were added in Transceiver-H-C.
For more extensive information on Hamlib data values, see Section 8.5 rigctl - at the command line
AGC buttons
These were actually configured for the FTdx101D.
The actual control values may or may not be correct for your radio.
Examine table buttonshl.
Find the records for ACG fast, medium and slow buttons.
The correct data values in nset (setting AGC delay) and nget (reading AGC delay) are 2, 5 and 3.
Where did I find these?? The following explains how.
- The FTdx101D CAT manual shows the GT command with values fast = 1, med = 2 and slow = 3.
(The actual decay times of fast, medium and slow are menu settings and differ between modes.)
- The Hamlib commands are \get_level VFOA AGC and \set_level VFOA AGC # where # is the value.
However I couldn't find any information on the actual Hamlib control values.
So where do I find the unexpected values of 2, 5 and 3 to configure in piWebCAT.?
The answer is to use rigctl at the Linux command line.
This is extremely useful for testing and in particular for checking the ranges of returned data.
eg: some command return 0.000 to 1.000, some return 0 to 255, some return in Hz.
The screen dump below is from the RPi Linux Terminal window.
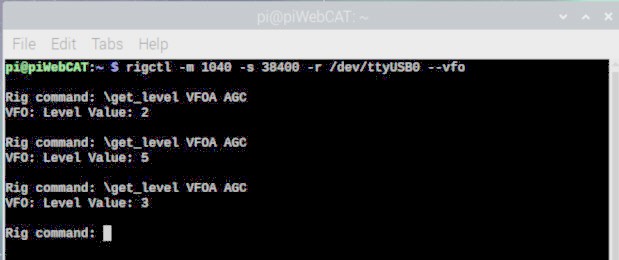
Here, I started rigctl for the FTdx101D (1040) at 38400 baud and for USB connection.
I set the rig to fast AGC and the entered \get_level VFOA AGC
I then repeated this for medium and slow AGC.
From the above window you can see that the returned levels were 2, 5 and 3.
These were used in the piWebCAT Hamlib configuration.
Starting rigctl in the RPi terminal for non --vfo mode and for --vfo mode
rigctl -m 3060 -s 19200 -r /dev/ttyAMA0 for non --vfo mode and
rigctl -m 3060 -s 19200 -r /dev/ttyAMA0 for --vfo mode
( /dev/ttyAMA0 is a serial connection. For USB, we specify .../dev/ttyUSB0 )
piWebCAT, internally uses similar start up commands for rigctld
Setting vfomode = Y in the database rigs table invokes --vfo mode - which must thereafter
be used in all Hamlib commands.