4.1 Command masks on ASCII radios
The examples are from the FTdx101D. Other modern Yaesu radios have a similar CAT system.
My configuration system for older Yaesu (5 - byte command) radios also uses these command masks.
piWebCAT's control actions are NOT read-modify-write (unlike my EncoderCAT project)
The controls are synchronised to the radio's settings at startup, on band change and by the reload button.
This uses the readmask and answermask settings to request the data and interpret the answer.
Subsequent button or slider action commands use setmask with the new position of a slider,
or from known buttons states. ie: only the set command is used.
(eg: for toggled buttons, piWebCAT uses the button's remembered on or off state to determine the new state.)
A example from the FTdx101D CAT manual - Noise Reduction Level.
The CAT manual entry is below. There are two identical receivers, MAIN and SUB.
(Note that the terminating semicolon is part of the command)
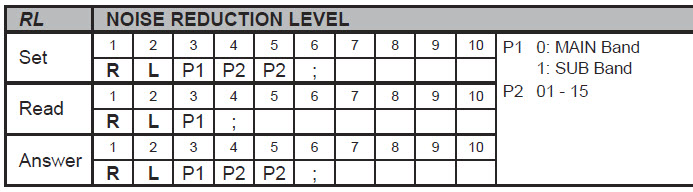
- MAIN - read = "RL0;" answer = "RL006;" set = "RL007;"
- SUB - read = "RL1;" answer = "RL106;" set = "RL107;"
In MAIN.Answer above: "RL0" is the command and '"06' is the variable data.
We configure the masks as follows::
readmask is "RL0;" for VfoA and RL1; fro VfoB
setmask and answermask are both RL0tu; for VfoA and RL1tu; for VfoB.
- "RL0" and RL1 are fixed as the first three characters.
- '"tu" indicates that the fourth and fifth characters are variable tens and units.
readbytes is 4 (ie: RL0; is 4 bytes) setbytes and answerbytes are 6 (ie: RL0tu; is six bytes)
Further example: frequency read and write
In piWebCAT, we tune with the current VFO which may be A or B
Yaesu CAT manual states

For VFOA readmask = FA; setmask and answermask are FAgfedcmhtu;
numbers 0 - 999 999 999 ie: 0 - 999 Mhz
For VFOB readmask = FB; setmask and answermask = FBgfedcmhtu;
readbytes is 3 (ie: FA; is 3bytes) setbytes and answerbytes are both 12.
List of 'variable' characters
I have defined a small list of lower case characters that represent variable data.
All other characters outside this list are interpreted as fixed.
The characters are g, f, e, d, c, m, h, t, u (u = units, t= tens, h = hundreds etc)
There is also s = sign - representing '-' or '+'
$ is don't care
The codes are detailed below in an extract from EncoderCAT C source code:
EncoderCAT and piWebCAT use the same codes for character interpretation:
For decimal digit ascii characters, ie: '0' to '9'
switch(mb)
{
case 'g': mult = 100000000; break; // g = hundred millions
case 'f': mult = 10000000; break; // f = ten millions
case 'e': mult = 1000000; break; // e = millions
case 'd': mult = 100000; break; // d = hundred thousands
case 'c': mult = 10000; break; // c = ten thousands
case 'm': mult = 1000; break; // m = thousands
case 'h': mult = 100; break; // h = hundreds
case 't': mult = 10; break; // t = tens
case 'u': mult = 1; break; // u = units
}
// Also s represents sign '-' or '+'
There is also x which is used for hexdecimal characters. eg: xx or xxxx
There are some hexadecimal code in modern Yaesu radios.
The main use is in the older Yaesu 5-byte command radios for which piWebCAT translates
a ten-character configuration string into five hexadecimal bytes for transmission to the radio.
See Yaesu 5-byte